
Hier werden Ableitungen in rotierenden Bezugssystemen betrachtet. Der Maple Quelltext ist:
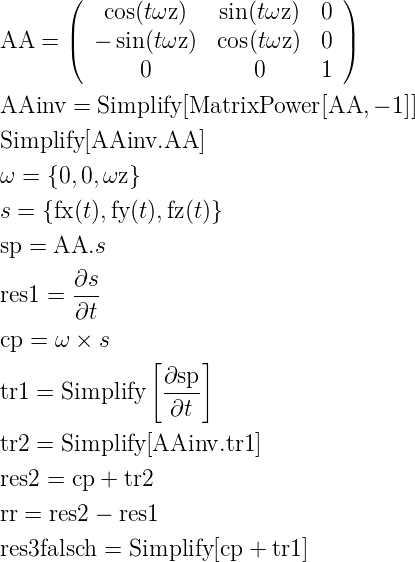
Der Mathematica-Quelltext ist
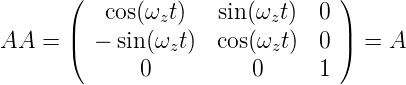
Hier ist angenommen worden, dass der Rotationsvektor  entlang der z-Richtung des Koordinatensystems angeordnet
ist. Dann transformiert die Matrix AA einen Vektor aus dem
Laborsystem in das rotierende Bezugssystem. AAinv
transformiert zurück. s ist der zeitabhängige Ortsvektor.
sp ist der Ortsvektor transformiert in das rotierende
Bezugssystem. tr1 ist die Ableitung von sp im rotierenden
Bezugssystemm tr2 ist tr1 zurücktransformiert in das
Laborsystem.
entlang der z-Richtung des Koordinatensystems angeordnet
ist. Dann transformiert die Matrix AA einen Vektor aus dem
Laborsystem in das rotierende Bezugssystem. AAinv
transformiert zurück. s ist der zeitabhängige Ortsvektor.
sp ist der Ortsvektor transformiert in das rotierende
Bezugssystem. tr1 ist die Ableitung von sp im rotierenden
Bezugssystemm tr2 ist tr1 zurücktransformiert in das
Laborsystem.
__________________________________________________________________________
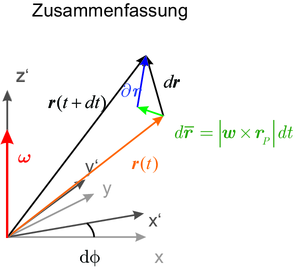
Beziehung zwischen den Ableitungen
_____________________________________________________________________
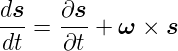
Gleichung
 | (H.1) |
gilt dann, wenn die Ableitung im rotierenden Bezugssystem zurück nach dem Laborsystem transformiert ist.


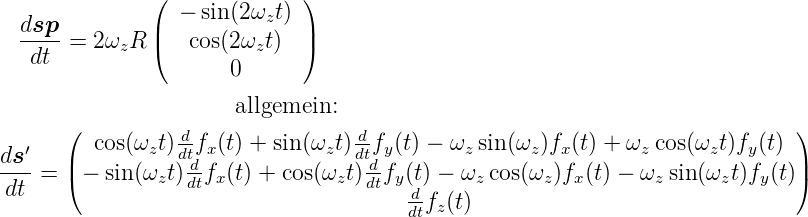
Nach der Transformation ins rotierende Bezugssystem erhält man

Die Ableitungen im Laborsystem sind

und im rotierenden Bezugssystem (gestrichenes Bezugssystem)
 |
Zurücktransformiert ins Laborsystem mit A−1 erhält
man
erhält
man

Das Kreuzprodukt ist

und
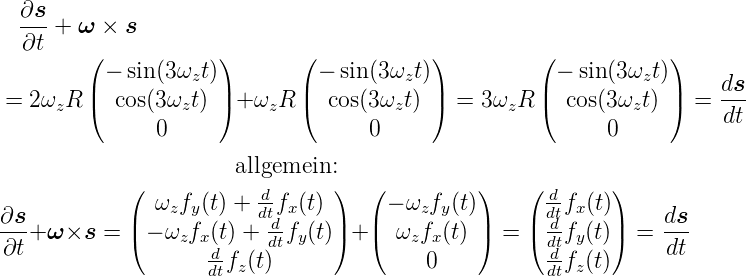 |
so dass sowohl im Spezialfall wie auch allgemein gilt
gilt. Wäre  nicht ins Laborsystem zurücktransformiert
worden, hätte man
nicht ins Laborsystem zurücktransformiert
worden, hätte man
 | (H.2) |
erhalten, was nicht das Resultat im Laborsystem ist.
| Wenn mit Vektoren in der Darstellung eines Koordinatensystems gerechnet wird, müssen alle Vektoren im gleichen Koordinatensystem dargestellt werden! |
 Lizenzinformationen
Lizenzinformationen