(Siehe Leisi, Klassische Physik II [Lei98, pp. 98])
| Versuch zur Vorlesung: | |
| Fadenstrahlrohr (Versuchskarte EM-11) | |
Um nicht immer die Lorentz-Transformation
ausrechnen zu müssen , führen wir die magnetische
Feldstärke oder die magnetische Induktion  ein. Ein
magnetisches Feld lenkt Elektronen ab. Wie wir schon früher
gesehen haben, ist eine Bewegung der Ladungsträger für
die magnetische Kraft notwendig. Wird das Magnetfeld
der Helmholtzspulen so gedreht, dass es parallel zur
Bewegungsrichtung der Elektronen liegt, verschwindet die
Magnetkraft. Das folgende Kraftgesetz
ein. Ein
magnetisches Feld lenkt Elektronen ab. Wie wir schon früher
gesehen haben, ist eine Bewegung der Ladungsträger für
die magnetische Kraft notwendig. Wird das Magnetfeld
der Helmholtzspulen so gedreht, dass es parallel zur
Bewegungsrichtung der Elektronen liegt, verschwindet die
Magnetkraft. Das folgende Kraftgesetz
|
beschreibt die magnetischen Kräfte auf Elektronen. Die
Kraft  L heisst Lorentz-Kraft.
L heisst Lorentz-Kraft.
Durch den Vergleich von Gleichung (3.1) und Gleichung (3.22) kann man für die magnetische Feldstärke einer linienförmigen Stromverteilung schreiben
 | (3.2) |
 | (3.3) |
ermöglicht es Gleichung (3.2) kompakter zu schreiben
 | (3.4) |
__________________________________________________________________________
_____________________________________________________________________
Die magnetische Induktion  bildet eine
Rechtsschraube um den Strom I (Daumen in
Stromrichtung, Finger zeigen in die Richtung der
magnetischen Induktion). bildet eine
Rechtsschraube um den Strom I (Daumen in
Stromrichtung, Finger zeigen in die Richtung der
magnetischen Induktion). |
| Versuch zur Vorlesung: | |
| Magnetische Feldlinien (Versuchskarte EM-50) | |
Die Kraft zwischen zwei stromdurchflossenen Leitern kann neu berechnet werden. Mit
 | (3.5) |
wobei q2 eine Ladung im Leiter 2 ist, und mit n2 der
Ladungsträgerdichte im Leiter 2, ℓ die betrachtete Länge, A2
der Querschnitt des Leiters und  =
=  , bekommt
man
, bekommt
man
 | (3.6) |
Der Strom im Leiter 2 ist nun aber
 | (3.7) |
Damit ist
 | (3.8) |
Wenn wir Gleichung (3.4) einsetzen, bekommen wir
 | (3.9) |
Diese Gleichung wird zur Definition der Einheit der magnetischen Induktion im SI-System verwendet.
|
Die Einheit der magnetischen Induktion ist
![[B] = Tesla = T = Ns--= -N--= Vs-
Cm Am m2](el-2017525x.png) | (3.11) |
Manchmal wird die magnetische Induktion auch als magnetische Flussdichte bezeichnet.
Die magnetische Induktion wurde so definiert, dass in Gleichung (3.9) alle Faktoren bis auf den Strom I2 und die Länge ℓ durch B(r) symbolisiert werden. Diese Wahl ist willkürlich. Wir hätten genau so gut ein Feld durch
 | (3.12) |
definieren können.  heisst magnetisches Feld oder
magnetische Feldstärke. Das magnetische Feld hat die
Einheit
heisst magnetisches Feld oder
magnetische Feldstärke. Das magnetische Feld hat die
Einheit
![[H ] = A-
m](el-2017528x.png)
Das magnetische Feld H ist unabhängig von der
Materie die den betrachteten Raum erfüllt. Die
magnetische Induktion B hängt vom den Raum
füllenden Material ab. |
 | (3.13) |
Die Kraft auf einen stromdurchflossenen Leiter in einem beliebigen Magnetfeld kann mit dem Gesetz von Biot-Savart berechnet werden.
__________________________________________________________________________
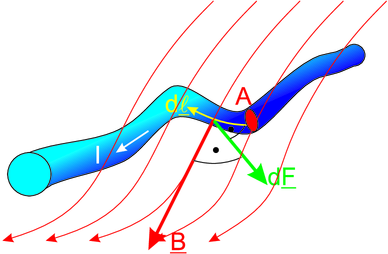
Berechnung der Kraft auf ein Leiterelement.
_____________________________________________________________________
Der Betrag des Vektors d , der senkrecht auf d
, der senkrecht auf d und
senkrecht auf d
und
senkrecht auf d steht, ist
steht, ist
 | (3.14) |
wobei n die Dichte der Ladungsträger und ϕ der Winkel
zwischen  und d
und d ist. Mit der Stromdichte
ist. Mit der Stromdichte  = n·
= n· ·q
erhalten wir
·q
erhalten wir
 | (3.15) |
Die vektorielle Schreibweise der Biot-Savart-Kraft ist demnach
|
| Folien zur Vorlesung vom 28. 05. 2009: PDF | |
| Aufgabenblatt 07 für das Seminar vom 03. 06. 2009 (Ausgabedatum 38. 05. 2009): (HTML oder PDF) | |
 | (3.17) |
Das Linienintegral im homogenen  -Feld kann wie folgt
berechnet werden:
-Feld kann wie folgt
berechnet werden:
__________________________________________________________________________
_____________________________________________________________________
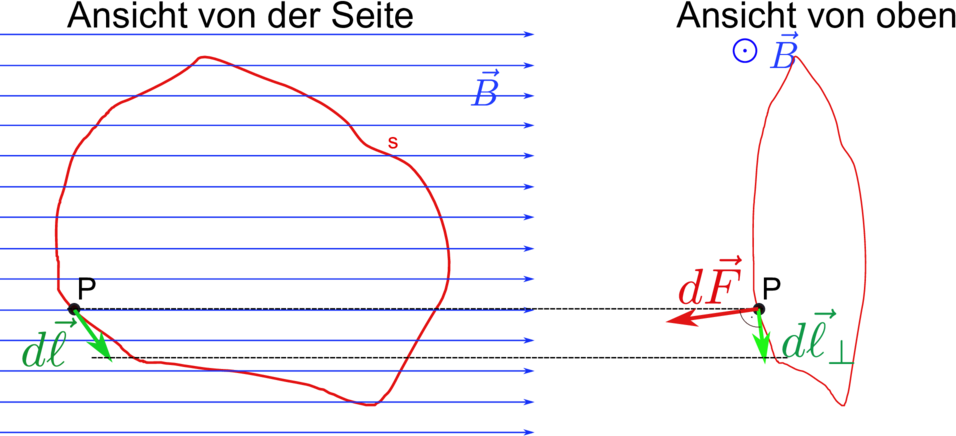
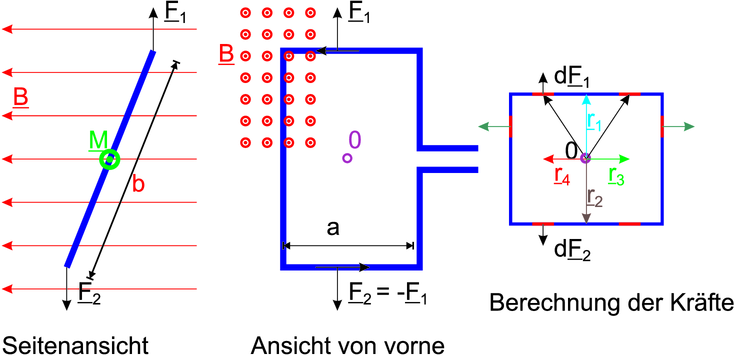
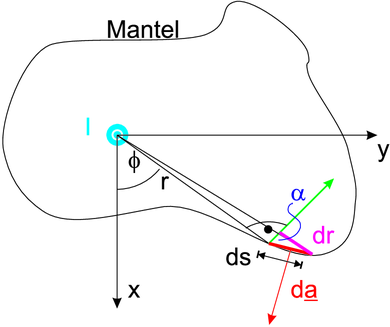
Vom Linienelement d aus Gleichung (3.17) trägt nur
die Komponente d
aus Gleichung (3.17) trägt nur
die Komponente d ⊥ senkrecht zu
⊥ senkrecht zu  zum Integral bei
(wegen dem Kreuzprodukt in der Gleichung). Abbildung
1 zeigt auf der rechten Seite die Leiterschlaufe projiziert
auf die Ebene senkrecht zu
zum Integral bei
(wegen dem Kreuzprodukt in der Gleichung). Abbildung
1 zeigt auf der rechten Seite die Leiterschlaufe projiziert
auf die Ebene senkrecht zu  .
.
Also kann Gleichung (3.17) umgeschrieben werden:
 | (3.18) |
d ⊥ über s summiert oder integriert ergibt null, da
damit eine geschlossene Kurve beschrieben wird,
bei der anfangs- und Endpunkt übereinstimmen,
also durch einen Vektor der Länge Null verbunden
sind.
⊥ über s summiert oder integriert ergibt null, da
damit eine geschlossene Kurve beschrieben wird,
bei der anfangs- und Endpunkt übereinstimmen,
also durch einen Vektor der Länge Null verbunden
sind.
d steht immer senkrecht auf d
steht immer senkrecht auf d ⊥ (wieder wegen
dem Kreuzprodukt). Die Länge von d
⊥ (wieder wegen
dem Kreuzprodukt). Die Länge von d ist um den
konstanten Faktor I·
ist um den
konstanten Faktor I· gegenüber d
gegenüber d ⊥ geändert.
Damit beschreibt d
⊥ geändert.
Damit beschreibt d einen geometrisch ähnlichen
geschlossenen Weg, um π∕2 gedreht und gedehnt. Damit
ist für eine geschlossene Leiterschlaufe im homogenen
magnetischen Feld
einen geometrisch ähnlichen
geschlossenen Weg, um π∕2 gedreht und gedehnt. Damit
ist für eine geschlossene Leiterschlaufe im homogenen
magnetischen Feld
 | (3.19) |
| Link zur Vorlesung: | |
| (Elektromotor) | |
| Versuch zur Vorlesung: | |
| Lorentz-Kraft (Versuchskarte EM046) | |
_______________________________________________
_____________________________________________________________________
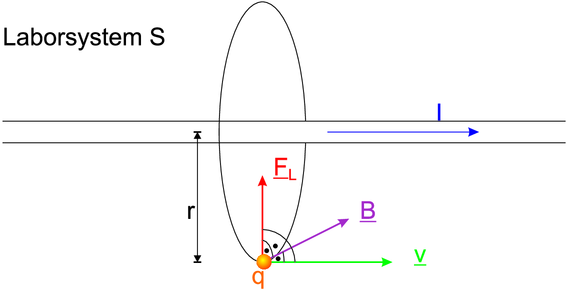
Wir betrachten dazu die rechteckige Leiterschlaufe aus Abbildung 2. Bezüglich 0 ist die Situation symmetrisch. Die in der Zeichnung vertikalen Leiterelemente liefern kollineare sich aufhebende Kräfte. Die horizontalen Segmente ergeben das infinitesimale Drehmoment
In Gleichung (3.20) enthält das Differential die Beiträge der oberen linken Seite plus die Beiträge der oberen rechten Seite plus die Beiträge der unteren linken Seite plus die Beiträge der unteren rechten Seite. Das gesamte Drehmoment bekommt man, indem man über die halbe Seite a integriert. | (3.21) |
Wenn  1 die Kraft auf die ganze obere Seite ist (und
1 die Kraft auf die ganze obere Seite ist (und
 2 entsprechend für die untere Seite), ist
2 entsprechend für die untere Seite), ist
 | (3.22) |
Damit ist
 | (3.23) |
Das Drehmoment  liegt in der Ebene der Leiterschlaufe.
Wenn ϕ der Winkel zwischen der Normalen auf
die Ebene der Leiterschlaufe und
liegt in der Ebene der Leiterschlaufe.
Wenn ϕ der Winkel zwischen der Normalen auf
die Ebene der Leiterschlaufe und  ist, gilt mit
F1 = a·I·B:
ist, gilt mit
F1 = a·I·B:
 | (3.24) |
Wir definieren das magnetische Moment  so, dass
es senkrecht auf die Ebene der Leiterschlaufe steht und
dass
so, dass
es senkrecht auf die Ebene der Leiterschlaufe steht und
dass  = Fläche·Strom = a·b·I ist. Damit
ist
= Fläche·Strom = a·b·I ist. Damit
ist
 | (3.25) |
Die Einheit des magnetischen Momentes ist
![[m ] = Am2](el-2017569x.png)
Das Drehmoment auf eine Leiterschlaufe im homogenen Magnetfeld wird in Drehspulinstrumenten, in Motoren oder bei der Sichtbarmachung von Magnetfeldern mit Eisenfeilspänen verwendet.
Bei einer beliebigen Leiterschlaufe kann das magnetische Moment berechnet werden, indem diese aus Einzelteilen zusammengesetzt wird.
__________________________________________________________________________
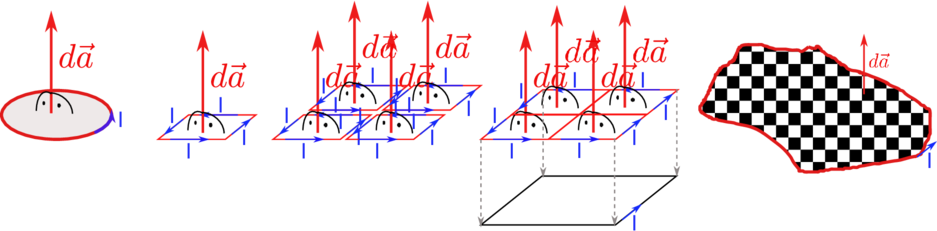
Links ist ein infinitesimales magnetisches Moment
aufgezeichnet. Rechts daneben ein quadratisches
infinitesimales Moment. Da alle vom gleichen Strom I
umrundet werden, und im gleichen Drehsinn, kann eine
endliche Fläche aus den infinitesimalen Flächen
zusammengesetzt werden. Daraus folgt die Vorschrift zur
Berechnung von  .
.
_____________________________________________________________________
Die Ströme im Inneren heben sich dabei jeweils auf (Siehe auch Abbildung 2). Aus der differentiellen Gleichung
 | (3.26) |
erhält man deshalb
 | (3.27) |
 | (3.28) |
Damit erhalten wir
 | (3.29) |
Wenn wir Epot(ϕ = π∕2) = 0 wählen haben wir
 | (3.30) |
Ein weiteres Beispiel einer Kraftwirkung auf Ladungen ist das Barlowsche Rad.
| Versuch zur Vorlesung: | |
| Barlowsches Rad (Versuchskarte EM004) | |
(Siehe Leisi, Klassische Physik II [Lei98, pp. 104])
Beim unendlich ausgedehnten geraden Leiter war das durch
einen Strom I erzeugte Magnetfeld durch kreisförmige
Magnetfeldlinien mit der Stärke B =  I charakterisiert,
wobei das
I charakterisiert,
wobei das  -Feld tangential zu den Kreisen liegt. Das
Linienintegral entlang der Feldlinien, also entlang des Kreises
S, ergibt
-Feld tangential zu den Kreisen liegt. Das
Linienintegral entlang der Feldlinien, also entlang des Kreises
S, ergibt
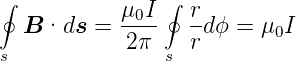 | (3.31) |
Dieses Linienintegral ist unabhängig von r. Die Behauptung ist, das die obige Gleichung, ein einfacher Fall des Ampèreschen Durchflutungsgesetzes, allgemeingültig ist.
Ampèresches Durchflutungsgesetz
|
Der Beweis geht in mehreren Schritten:
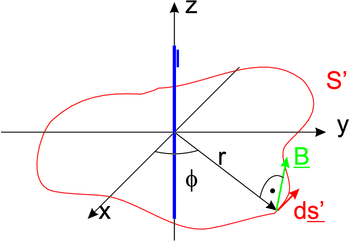
 ′ ist die Projektion des Weglängenelementes d
′ ist die Projektion des Weglängenelementes d auf der Kurve s auf die in der xy-Ebene liegende
Projektion der Kurve s′. Es ist
auf der Kurve s auf die in der xy-Ebene liegende
Projektion der Kurve s′. Es ist

da  (r) keine Komponente in die z-Richtung hat.
Es ist
(r) keine Komponente in die z-Richtung hat.
Es ist
und damit


Das bedeutet, dass Ströme durch Leiter, die nicht vom Integrationsweg s′′ umschlossen werden, keinen Beitrag zum Integral geben.
wobei diejenigen Ströme, die mit dem Umlaufsinn von s eine Rechtsschraube bilden, positiv zu zählen sind.
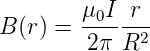
Ein zylindrischer Leiter mit dem Radius R soll homogen vom
Strom I durchflossen werden. Die Stromdichte  und der
Strom I stehen dann betragsmässig wie
und der
Strom I stehen dann betragsmässig wie

in Beziehung. Aus Symmetriegründen sind die Magnetfeldlinien konzentrische Kreise um den Leiter. Wir betrachten einen zum Strom konzentrischen Integrationsweg s. Ausserhalb des Leiters (r > R) haben wir

und daraus
Innerhalb des Leiters (r ≤ R) gilt

und damit
______________________________________________________________________________________________________
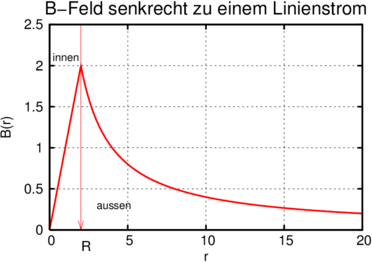
Tangentiales Magnetfeld eines ausgedehnten, unendlich langen Linienstromes.
_____________________________________________________________________
Mit dem Stokeschen Satz (Gleichung (C.1)) kann man die Integralform des Ampèreschen Gesetzes umschreiben
 | (3.33) |
Da diese Gleichungen für alle Integrationsflächen A(S) gelten müssen, muss auch die differentielle Form des Ampèreschen Gesetzes gelten
|
Beispiel: homogene Stromverteilung in einem unendlich ausgedehnten Leiter
__________________________________________________________________________
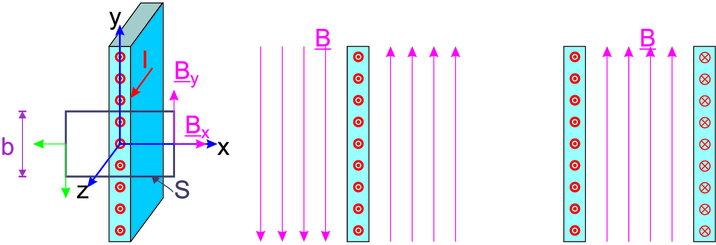
Magnetfeld einer homogenen Stromverteilung in einer dünnen Platte. Links: die Geometrie zur Berechnung, Mitte: das Magnetfeld eines homogenen Stromflusses und Rechts: das Magnetfeld zweier antiparallel von Strom durchflossener Platten.
_____________________________________________________________________
Wir definieren eine lineare Stromdichte
([j] = A/m). In unserem Falle hängt  und
und  über
über

zusammen. Das Stromfeld können wir uns als Parallelschaltung vieler linearer Leiter vorstellen. Aus dem Superpositionsprinzip folgt, dass in der z-Richtung
 | (3.35) |
Das resultierende Feld dieser Superposition muss in der
xy-Ebene liegen. Auf den beiden Seiten senkrecht zur Platte
finden sich immer zwei Stromfäden, die die x-Komponente
kompensieren. Wenn wir später das Ampèresche Gesetz auf
diese beiden Seiten anwenden, gibt es keine Komponente von
 parallel zur Seite: dieser Teil des Linienintegrals ist
null.
parallel zur Seite: dieser Teil des Linienintegrals ist
null.
Wir betrachten weiter die Komponenten Bx(x) und By(x)
des Feldes  im Abstand x von der Platte. Wir werden zwei
Symmetrieoperationen an:
im Abstand x von der Platte. Wir werden zwei
Symmetrieoperationen an:

und damit

sein.
 → −
→ − . Die Situation am Ende ist
ununterscheidbar von der am Anfang. Also gilt auch
. Die Situation am Ende ist
ununterscheidbar von der am Anfang. Also gilt auch

.
Mit den beiden Symmetrieüberlegungen folgt:
 | (3.36) |
Um  y zu bestimmen, nehmen wir an, dass unser
Integrationspfad S symmetrisch bezüglich der Platte ist. Das
Ampèresche Gesetz sagt
y zu bestimmen, nehmen wir an, dass unser
Integrationspfad S symmetrisch bezüglich der Platte ist. Das
Ampèresche Gesetz sagt

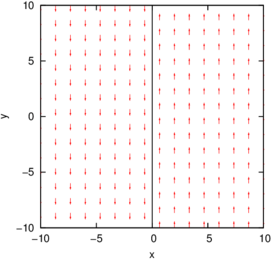
Das Resultat ist unabhängig von x und homogen im Raum. Die Magnetfeldlinien sind parallel zur Platte und links und rechts antiparallel (siehe Abbildung 3.8.3.1, Mitte).
 | (3.37) |
Bei zwei antiparallel von Strom durchflossenen Platten ist das Magnetfeld auf den Raum zwischen den Platten beschränkt.
 | (3.38) |
Die beiden Gleichungen sind einheitenmässig korrekt, da
[j] = ![[ ]
Ir](el-2017615x.png) = A/m ist.
= A/m ist.
Anwendungsbeispiele: Streifenleiter, Koaxialkabel, Modell für eine Spule
| Folien zur Vorlesung vom 04. 06. 2009: PDF | |
| Aufgabenblatt 08 für das Seminar vom 10. 06. 2009 (Ausgabedatum 04. 06. 2009): (HTML oder PDF) | |
(Siehe Leisi, Klassische Physik II [Lei98, pp. 111])
In diesem Abschnitt soll gezeigt werden, dass das Magnetfeld quellenfrei ist.
__________________________________________________________________________
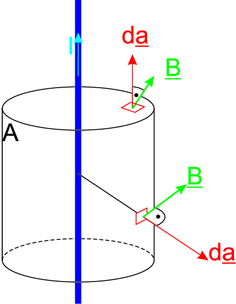
Integrationsfläche zur Analyse der Quellenfreiheit des Magnetfeldes
_____________________________________________________________________
Da überall auf der Integrationsfläche A gilt:  ·d
·d = 0,
ist
= 0,
ist
 | (3.39) |
Wir verallgemeinern das Resultat, indem wir einen Zylinder mit beliebiger Grund- und Deckfläche nehmen. Auf der Grund und Deckfläche gilt das vorherige Argument, so dass
ist.
__________________________________________________________________________
Integration über die Mantelfläche.
_____________________________________________________________________
An der Mantelfläche gilt mit da = h·ds


und damit

Damit gilt auch für allgemeine Zylinderflächen
 | (3.40) |
Mit diesem Resultat zeigt man, dass dieses Integral für beliebige Flächen um einen Leiter null ist. Schliesslich zeigt man, dass das Resultat auch für beliebige Stromverteilungen gilt. Mit dem Gaussschen Satz (Gleichung (C.1)) zeigt man
Quellenfreiheit des Magnetfeldes
oder in differentieller Form
|
Die Quellenfreiheit des magnetischen Feldes bedeutet, dass es keine magnetischen Ladungen gibt und dass die Feldlinien im Endlichen geschlossen sind.
 -Feld einer beliebigen Stromverteilung: das
Vektorpotential
-Feld einer beliebigen Stromverteilung: das
Vektorpotential 
(Siehe Leisi, Klassische Physik II [Lei98, pp. 114])
| Versuch zur Vorlesung: | |
| Magnetfeld von Leitern (Versuchskarte Em021) | |
In diesem Abschnitt wollen wir die Frage lösen: wie
konstruiere ich eine magnetische Induktion  möglichst
bequem? Das Rezept stammt aus der Elektrizitätslehre (Siehe
Abschnitt 2.5). Dort wurde gezeigt, dass aus einem beliebigen
Potential U(
möglichst
bequem? Das Rezept stammt aus der Elektrizitätslehre (Siehe
Abschnitt 2.5). Dort wurde gezeigt, dass aus einem beliebigen
Potential U( ) durch
) durch

eindeutig ein elektrisches Feld  (
( ) konstruiert werden kann,
das dem Gesetz der Elektrostatik
) konstruiert werden kann,
das dem Gesetz der Elektrostatik

genügt. Grundlage war die Vektoridentität

die für beliebige Funktionen U( ) gilt (siehe Gleichung
(C.29)). Es gibt unter den Rechenregeln für Vektorableitungen
(siehe Abschnitt C.8.4) eine weiter Identität mit dem
Nullvektor, nämlich Gleichung (C.30).
) gilt (siehe Gleichung
(C.29)). Es gibt unter den Rechenregeln für Vektorableitungen
(siehe Abschnitt C.8.4) eine weiter Identität mit dem
Nullvektor, nämlich Gleichung (C.30).

Jedes Magnetfeld muss das Ampèresche Gesetz
rot  = μ0
= μ0 und die Quellenfreiheit div
und die Quellenfreiheit div  = 0 erfüllen.
Analog zur Poissongleichung Gleichung (2.4) soll auch für das
Magnetfeld eine Potentialgleichung gelten. Wir müssen also
nach Gleichung (C.30) ein beliebiges Vektorfeld
= 0 erfüllen.
Analog zur Poissongleichung Gleichung (2.4) soll auch für das
Magnetfeld eine Potentialgleichung gelten. Wir müssen also
nach Gleichung (C.30) ein beliebiges Vektorfeld  wählen
und die magnetische Induktion
wählen
und die magnetische Induktion  gleich der Rotation von
gleich der Rotation von  setzten: dann ist die Divergenzfreiheit von
setzten: dann ist die Divergenzfreiheit von  gewährleistet.
Mit dem Vektorpotential
gewährleistet.
Mit dem Vektorpotential 
 | (3.43) |
werden beide Gleichungen erfüllt. Wegen der Vektoridentität
 | (3.44) |
ist die Quellenfreiheit bei beliebiger Wahl von  garantiert. Mit
der zweiten Vektoridentität rot
garantiert. Mit
der zweiten Vektoridentität rot  = grad
= grad  −Δ
−Δ bekommen wir aus dem Ampèreschen Gesetz
bekommen wir aus dem Ampèreschen Gesetz
 | (3.45) |
Die Einheit des Vektorpotentials ist
![[A ] = Vs- = N-
m A](el-2017652x.png)
Das Vektorpotential  kann immer so gewählt
werden, dass div
kann immer so gewählt
werden, dass div  = 0 gilt.
= 0 gilt.
Das Vektorpotential ist nicht eindeutig bestimmt.
Nehmen wir an, dass ein Vektorpotential mit
div  = f ⇔ 0 existiert. Dann existiert auch ein Vektorfeld
= f ⇔ 0 existiert. Dann existiert auch ein Vektorfeld
 = grad ϕ mit
= grad ϕ mit

Wegen Gleichung (3.47) gilt dann

Dies bedeutet, dass das neue Vektorpotential das gleiche
 -Feld erzeugt wie das ursprüngliche. Wegen Gleichung
(3.47) gilt auch
-Feld erzeugt wie das ursprüngliche. Wegen Gleichung
(3.47) gilt auch

Zu jedem Vektorpotential  kann ein Vektorpotential kann ein Vektorpotential
 ′ gefunden werden, so dass div ′ gefunden werden, so dass div  ′ = 0 ist. ′ = 0 ist. |
Diese Eichung heisst Coulombeichung.
Das zu einer realen physikalischen Situation
gehörende Vektorpotential  ist nicht eindeutig
bestimmt. Die Wahl eines der zur gleichen Lösung
von ist nicht eindeutig
bestimmt. Die Wahl eines der zur gleichen Lösung
von  gehörenden Potentiale nennt man Eichung. gehörenden Potentiale nennt man Eichung.
|
| In der Relativitätstheorie und in der Quantenmechanik rechnet man bevorzugt mit dem Vektorpotential. |
Da div  = f eine beliebige zahlenwertige Funktion sein
kann, kann diese zum Beispiel auch die zeitliche Ableitung
des elektrischen Potentials sein, also auch
= f eine beliebige zahlenwertige Funktion sein
kann, kann diese zum Beispiel auch die zeitliche Ableitung
des elektrischen Potentials sein, also auch
 | (3.47) |
sein. Diese Lorentzeichung ist relativistisch invariant und wird deshalb gerne in der Relativitätstheorie und der Quantenfeldtheorie verwendet.
| Folien zur Vorlesung vom 08. 06. 2009: PDF | |
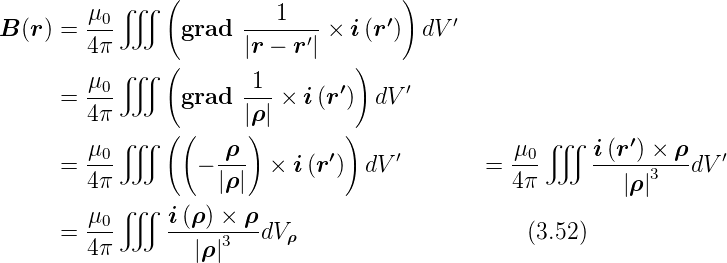
Aus der Gleichung für das Vektorpotential einer Stromverteilung
 | (3.48) |
kann man die Umkehrfunktion berechnen und erhält, analog zur Elektrostatik,
 | (3.49) |
Aus der Beziehung rot  =
=  (Siehe Landau und
Lifschitz, Klassische Feldtheorie [LL89, pp. 121]) bekommen
wir
(Siehe Landau und
Lifschitz, Klassische Feldtheorie [LL89, pp. 121]) bekommen
wir
 | (3.50) |
Nun bezieht sich die Rotation nur auf  , nicht aber auf
, nicht aber auf  ′.
Deshalb kann sie unter das Integral gezogen werden.
′.
Deshalb kann sie unter das Integral gezogen werden.
 | (3.51) |
Nun gilt für die Rotation eines Produktes (Siehe Bronstein, Taschenbuch der Mathematik [BSMM08, pp. 468])

Hier ist der Vektor  (
( ′) bezüglich der Rotation eine
Konstante, da er nur von
′) bezüglich der Rotation eine
Konstante, da er nur von  ′ und nicht von
′ und nicht von  abhängt. Weiter
darf die Ableitung irgend eines Punktes nicht davon abhängen
dass das Koordinatensystem um einen konstanten Vektor
verschoben wurde. Wir rechnen deshalb die Ableitungen in
der Rotation, beziehungsweise im Gradienten, nicht bezüglich
abhängt. Weiter
darf die Ableitung irgend eines Punktes nicht davon abhängen
dass das Koordinatensystem um einen konstanten Vektor
verschoben wurde. Wir rechnen deshalb die Ableitungen in
der Rotation, beziehungsweise im Gradienten, nicht bezüglich
 sondern bezüglich des verschobenen Koordinatensystems
sondern bezüglich des verschobenen Koordinatensystems
 =
=  −
− ′ aus. Es bleibt also
′ aus. Es bleibt also
Die letzte Zeile ergibt sich, da für die Zwecke der
Integration  eine Konstante ist. Auch hier muss das
Resultat der Integration unabhängig davon sein, dass wir
das Koordinatensystem verschoben oder das Vorzeichen
geändert haben. Deshalb darf man
eine Konstante ist. Auch hier muss das
Resultat der Integration unabhängig davon sein, dass wir
das Koordinatensystem verschoben oder das Vorzeichen
geändert haben. Deshalb darf man  (
( ′) =
′) =  (
( −
− ) =
) =  (
( )
setzen.
)
setzen.
Wir betrachten nun einen infinitesimal dünnen Strom
dI Draht(
Draht( ′) =
′) =  = Id
= Id .
.  Draht ist ein Einheitsvektor
entlang des Drahtes. Da
Draht ist ein Einheitsvektor
entlang des Drahtes. Da  überall null ist ausser auf dem
eindimensionalen Draht, wird aus dem Volumenintegral ein
eindimensionales Integral. Wieder ist es für die Integration
egal, ob wir
überall null ist ausser auf dem
eindimensionalen Draht, wird aus dem Volumenintegral ein
eindimensionales Integral. Wieder ist es für die Integration
egal, ob wir  von
von  ′ oder von
′ oder von  abhängen lassen.
abhängen lassen.
 | (3.53) |
Diese Gleichung ist bekannt als das Gesetz von Biot-Savart. Mit ihm kann man das Feld einer beliebigen Leiteranordnung berechnen.
Auch wenn sie physikalisch keine Bedeutung hat, kann es sinnvoll sein in Zwischenschritten die differentielle Formulierung zu verwenden, nämlich die Formel von Laplace.
 | (3.54) |
Achtung: nur die integrale Form hat eine physikalische Bedeutung!
Beispiel:
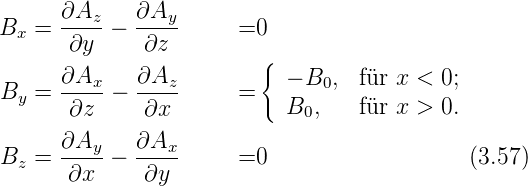
Wir hatten in Abbildung 3.8.3.1 gesehen, dass ein homogener Strom in die +z-Richtung homogene magnetische Induktionen links und rechts erzeugt. Die Magnetfelder haben die Form
 | (3.55) |
Für x = 0 ist By nicht definiert.
__________________________________________________________________________
_____________________________________________________________________
Das zu Gleichung (3.55) gehörige Vektorpotential ist
Wieder ist  für x = 0 nicht definiert. Aus
für x = 0 nicht definiert. Aus  = rot
= rot  bekommt man
bekommt man
__________________________________________________________________________
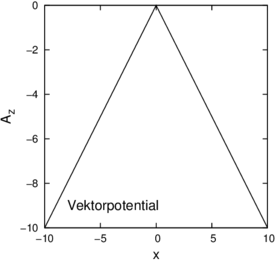
z-Komponente des Vektorpotentials einer unendlichen Stromdichte in z-Richtung in der (x = 0)-Ebene.
_____________________________________________________________________
Beispiel:
ergibt das magnetische Feld für einen in der z-Richtung laufenden Strom I
In Zylinderkoordinaten (r,𝜃,z) gehört zum Magnetfeld
 Lizenzinformationen
Lizenzinformationen