α(α) die Drehmatrix. Dann ist der aus
α(α) die Drehmatrix. Dann ist der aus  hervorgegangene
um die Achse
hervorgegangene
um die Achse  α und den Winkel α gedrehte Vektor
α und den Winkel α gedrehte Vektor

Sei Rα(α) die Drehmatrix. Dann ist der aus hervorgegangene
um die Achse α und den Winkel α gedrehte Vektor
 | (I.1) |
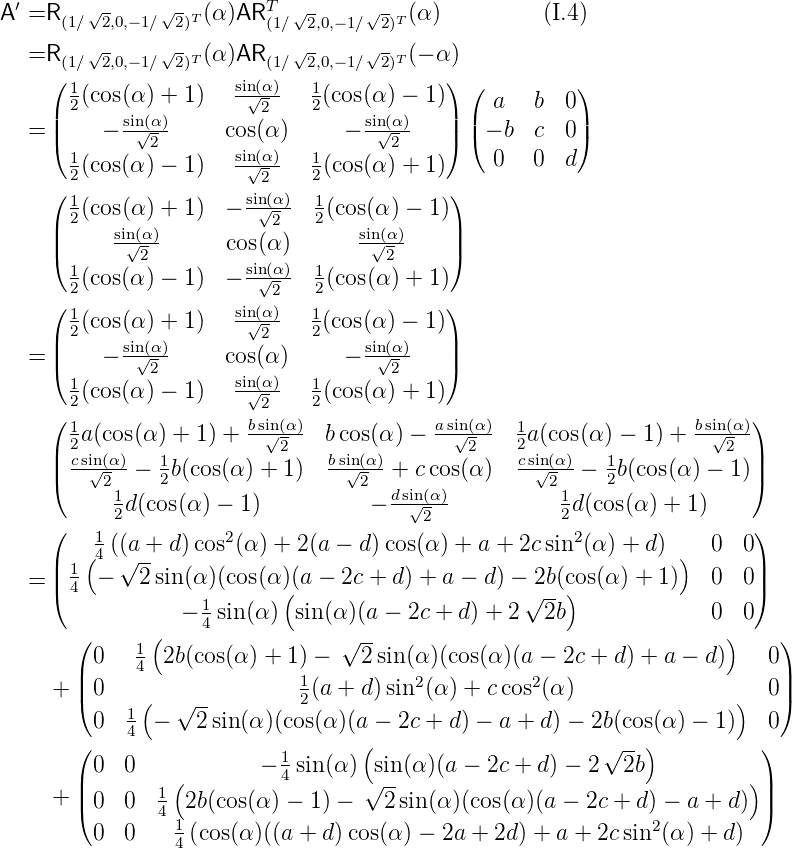
Ein Beispiel dafür ist in (I.4) gezeigt.
Die aus der Matrix
hervorgegangene um die Achse  α und den Winkel α
gedrehte Matrix ist
α und den Winkel α
gedrehte Matrix ist
 | (I.2) |
Die Drehung zurück ist dann
 | (I.3) |
Wenn wir als Beispiel die Matrix
um  α =
α =  T drehen, erhalten wir
T drehen, erhalten wir
 Lizenzinformationen
Lizenzinformationen