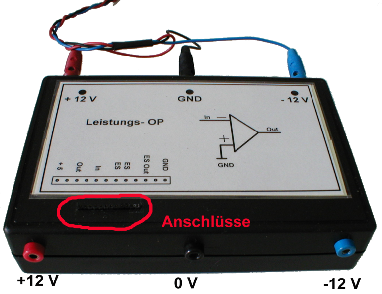
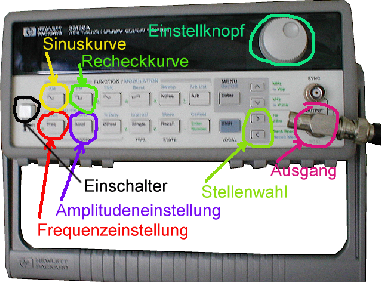
Im Bild sind die wichtigsten Bedienelemente angegeben.
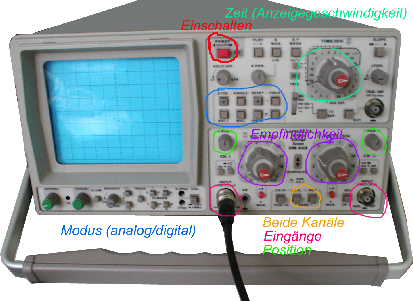
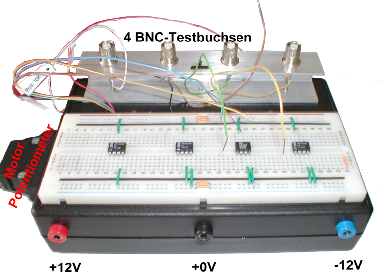
Im Bild sind die wichtigsten Bedienelemente angegeben.





> currentdir(‘d:/ihr Verzeichnis/‘);
> f := readdata(‘ihre Datei.txt‘,float,2):
Die erste Spalte enthaelt den Ausgangswert, die zweite die Zeit
> x := array[0..1000];
> y := array[0..1000];
> for i from 1 to 600 by 1 do
> y[i] := f[i,1]:
> x[i] := f[i,2]:
> end do:
>
> G :=sum((x[j+1]-x[j])*y[j]*exp(-s*x[j]),j=1..max1):
> F := abs(subs(s=I*w,G)):
> Phi := 180/Pi*argument(subs(s=I*w, G)):
> A_plot := listplot([seq([x[ii],y[ii]],ii=1..max1)]):
>
> G_plot := plot(G,s=-10..10):
> F_plot := loglogplot(F,w=0.01..1000):
> phi_plot := semilogplot(Phi,w=0.01..1000):
> display(A_plot,labels=["t","A"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(G_plot,labels=["s","G"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(G1_plot,labels=["s","G"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(F_plot,labels=["w","F"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(F1_plot,labels=["w","F"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(phi_plot,labels=["w","Phi"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(phi1_plot,labels=["w","Phi"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
>
> f := readdata(‘ihre Datei.txt‘,float,2):
Die erste Spalte enthaelt den Ausgangswert, die zweite die Zeit
> x := array[0..1000];
> y := array[0..1000];
> for i from 1 to 600 by 1 do
> y[i] := f[i,1]:
> x[i] := f[i,2]:
> end do:
>
> G :=sum((x[j+1]-x[j])*y[j]*exp(-s*x[j]),j=1..max1):
> F := abs(subs(s=I*w,G)):
> Phi := 180/Pi*argument(subs(s=I*w, G)):
> A_plot := listplot([seq([x[ii],y[ii]],ii=1..max1)]):
>
> G_plot := plot(G,s=-10..10):
> F_plot := loglogplot(F,w=0.01..1000):
> phi_plot := semilogplot(Phi,w=0.01..1000):
> display(A_plot,labels=["t","A"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(G_plot,labels=["s","G"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(G1_plot,labels=["s","G"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(F_plot,labels=["w","F"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(F1_plot,labels=["w","F"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(phi_plot,labels=["w","Phi"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
> display(phi1_plot,labels=["w","Phi"],labelfont=[TIMES, ROMAN, 15],axes=boxed);
>