__________________________________________________________________________
Mitgeführtes orthogonales Koordinatensystem und kartesisches Koordinatensystem
_____________________________________________________________________

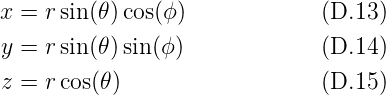
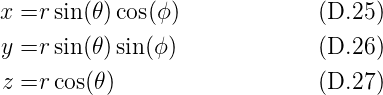
Wir betrachten die Definition der Kugelkoordinaten
__________________________________________________________________________
Mitgeführtes orthogonales Koordinatensystem und kartesisches Koordinatensystem
_____________________________________________________________________
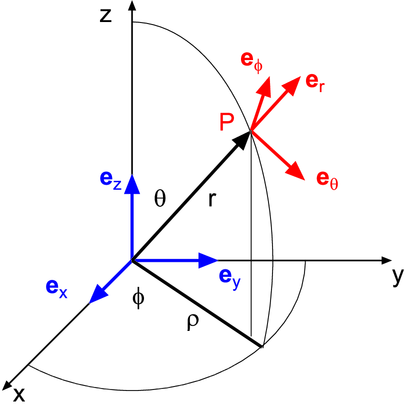
Gegeben sind einerseits die kartesischen Koordinaten x, y
und z, andererseits die Kugelkoordinaten r, ϕ, und 𝜃. Am
Punkt P definieren wir ein mitgeführtes kartesisches
Koordinatensystem. Seine Orientierung hängt also von der
Zeit ab! Beide Koordinatensysteme sind jeweils durch ein
Tripel von Einheitsvektoren gegeben, die jeweils gegenseitig
orthogonal sind. Die Einheitsvektoren sind im kartesischen
System  x,
x,  y und
y und  z und im mitgeführten kartesischen
System
z und im mitgeführten kartesischen
System  r,
r,  ϕ und
ϕ und  𝜃.
𝜃.
__________________________________________________________________________
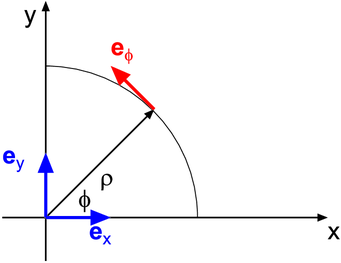
Betrachtung in der xy-Ebene für  ϕ
ϕ
_______________________________________________________________________________________
Wir betrachten zuerst die xy-Ebene. Die Projektion des Ortsvektors r auf diese Ebene nennen wir ϱ. Wir erhalten also die Beziehungen (Einheitsvektoren!)
__________________________________________________________________________
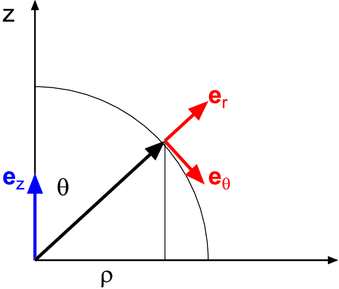
Betrachtung in der ϱz-Ebene zur Bestimmung von  r
und
r
und  𝜃
𝜃
_______________________________________________________________________________________
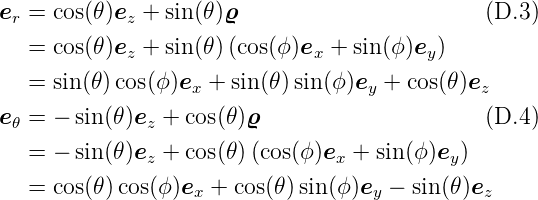
Wir betrachten nun die Ebene gebildet aus den Vektoren  und
und  z. In dieser Darstellung ist
z. In dieser Darstellung ist  r radial und
r radial und  𝜃 zeigt in die
Richtung der positiven 𝜃-Koordinate. Dadurch ist auch
𝜃 zeigt in die
Richtung der positiven 𝜃-Koordinate. Dadurch ist auch  r,
r,  𝜃
und
𝜃
und  ϕ in dieser Reihenfolge ein ortogonales Rechtssystem.
Aus der Abbildung liest man
ϕ in dieser Reihenfolge ein ortogonales Rechtssystem.
Aus der Abbildung liest man
Dabei merken wir uns, dass 𝜃 und ϕ Funktionen der Zeit sind. Zusammenfassend erhalten wir
Wir wissen, dass  x,
x,  y und
y und  z ein orthogonales Koordinatensystem
ist. Also ist insbesondere 1 =
z ein orthogonales Koordinatensystem
ist. Also ist insbesondere 1 =  x·
x· x =
x =  y·
y· y =
y =  z·
z· z und
0 =
z und
0 =  x·
x· y =
y =  y·
y· zx =
zx =  z·
z· x. Wenn wir mit diesem
Wissen
x. Wenn wir mit diesem
Wissen  r·
r· r,
r,  𝜃·
𝜃· 𝜃 und
𝜃 und  ϕ·
ϕ· rϕ sowie
rϕ sowie  r·
r· 𝜃,
𝜃,  𝜃·
𝜃· ϕ
und
ϕ
und  ϕ·
ϕ· r berechnen, können wir zeigen, dass auch
das Koordinatensystem
r berechnen, können wir zeigen, dass auch
das Koordinatensystem  r,
r,  𝜃 und
𝜃 und  ϕ ein orthogonales
Koordinatensystem ist.
ϕ ein orthogonales
Koordinatensystem ist.
Wenn wir dieses Gleichungssystem nach  x,
x,  y und
y und  z
auflösen, erhalten wir die Umkehrrelationen
z
auflösen, erhalten wir die Umkehrrelationen
Durch Rückeinsetzen kann man sich überzeugen, dass dies konsistente Formulierungen sind.
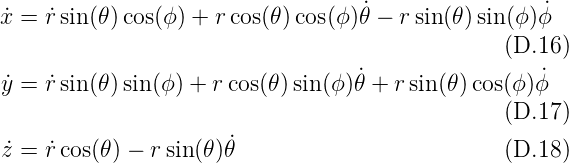
Wir wissen, dass in kartesischen Koordinaten
 | (D.11) |
der Ortsvektor ist. Die Geschwindigkeit ist dann
 | (D.12) |
Wir verwenden die Beziehungen
und leiten sie ab. Wir erhalten
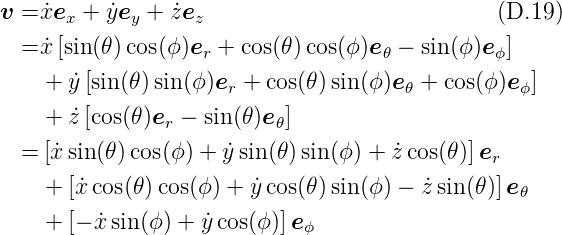
Wir setzen in die Gleichung D.12 die Gleichungen D.8, D.9,
D.10, D.16, D.17 und D.18 ein und ordnen nach  r,
r,  𝜃 und
𝜃 und
 ϕ.
ϕ.
Der Übersichtlichkeit halber berechnen wir nun die drei
Komponenten  r,
r,  𝜃 und
𝜃 und  ϕ getrennt. Wir beginnen mit
ϕ getrennt. Wir beginnen mit
 r.
r.
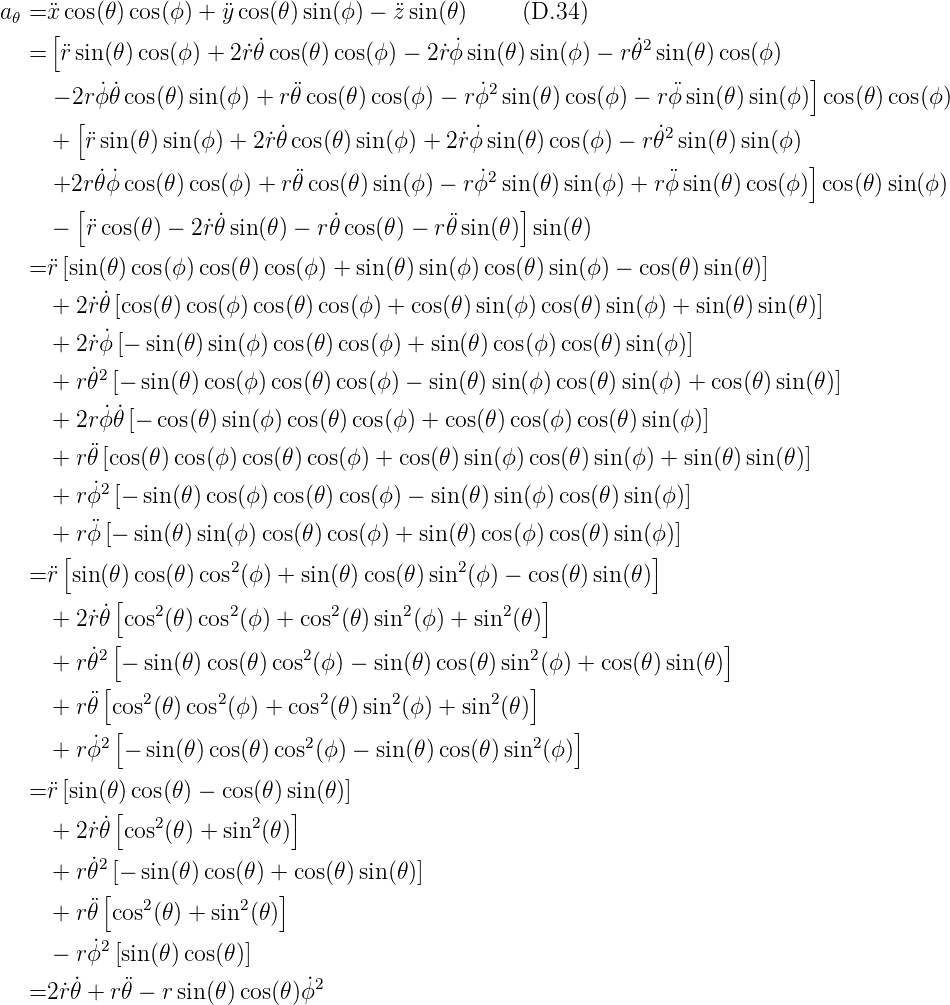
Wir fahren mit  𝜃 weiter.
𝜃 weiter.
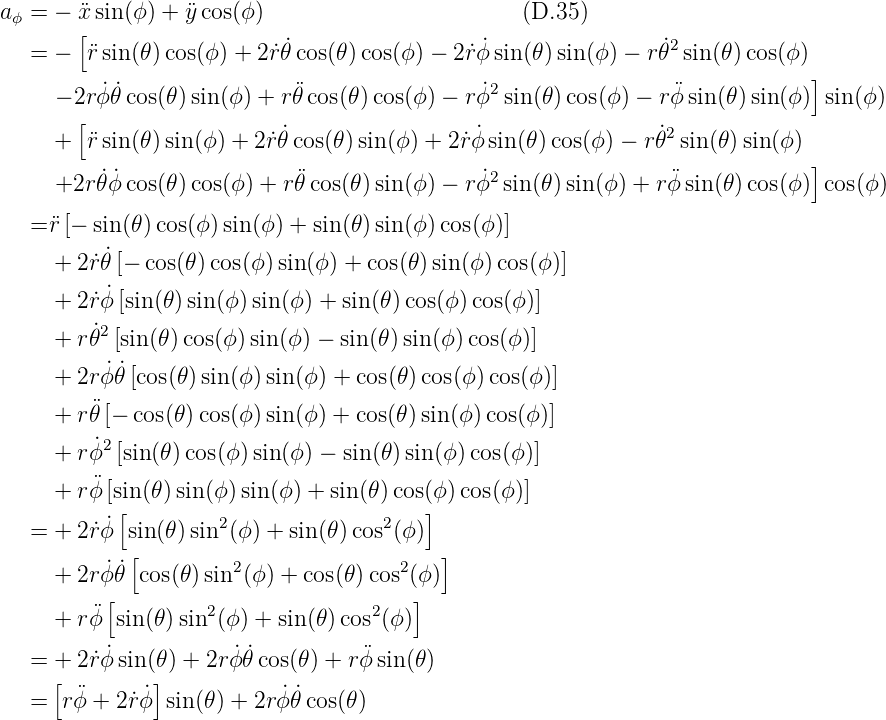
Wir schliessen mit  ϕ.
ϕ.
Zusammenfassend haben wir
Die Beschleunigung ist in kartesischen Koordinaten
 | (D.24) |
Wir verwenden die Beziehungen
und leiten sie zweimal ab. Wir erhalten aus

die Gleichungen
und
sowie
Wir setzen in die Gleichung D.24 die Gleichungen D.8, D.9,
D.10, D.28, D.29 und D.30 ein und ordnen nach  r,
r,  𝜃 und
𝜃 und
 ϕ.
ϕ.
Der Übersichtlichkeit halber berechnen wir nun die drei
Komponenten  r,
r,  𝜃 und
𝜃 und  ϕ getrennt. Wir beginnen mit
ϕ getrennt. Wir beginnen mit
 r.
r.
und
und schliesslich
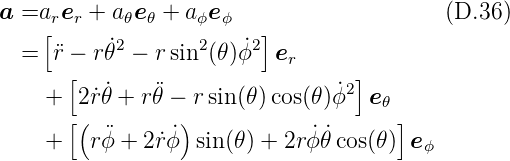
Zusammenfassend haben wir
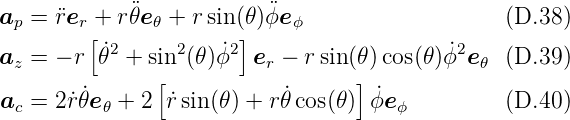
Wir teilen die Beschleunigung in drei Komponenten auf
 | (D.37) |
Dies ist in der angegebenen Reihenfolge die Parallelbeschleunigung, die den Betrag der Geschwindigkeit erhöht, die Zentripetalbeschleunigung und die Coriolis-Beschleunigung.
Im Einzelnen haben wir
 Lizenzinformationen
Lizenzinformationen