 x =
x =  T um den Winkel α wird durch die
Matrix
T um den Winkel α wird durch die
Matrix

Eine Drehung um die x-Achse beschrieben durch den
Vektor x = T um den Winkel α wird durch die
Matrix
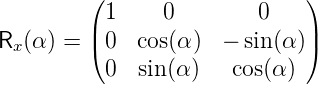 | (I.1) |
die Transformation ausgeführt. Für eine Drehung um die
y-Achse beschrieben durch den Vektor  y =
y =  T um den
Winkel β wird durch die Matrix
T um den
Winkel β wird durch die Matrix
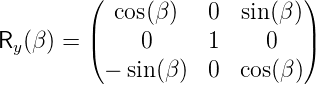 | (I.2) |
die Transformation ausgeführt. Schliesslich wird eine Drehung
um die y-Achse beschrieben durch den Vektor  z =
z =  T
um den Winkel γ wird durch die Matrix
T
um den Winkel γ wird durch die Matrix
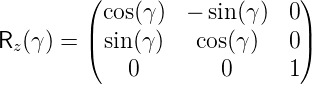 | (I.3) |
ausgeführt.
Der Vektor  =
=  T soll um den Winkel α um die
x-Achse gedreht werden. Dies wird mit der Operation
T soll um den Winkel α um die
x-Achse gedreht werden. Dies wird mit der Operation
 | (I.4) |
bewerkstelligt. Im Allgemeinen wird eine Drehung durch die Multiplikation des Vektors von links mit einer Matrix beschrieben.
Die Drehung zurück wird (antisymmetrische reelle Matrix mit der Determinante 1) wird durch die inverse Matrix oder die transponierte Matrix beschrieben Alternativ kann man auch α durch −α ersetzen.
 | (I.5) |
Eine Drehung um einen beliebigen Vektor  α =
α =  T
mit xα2 + y
α2 + z
α2 = 1 wird durch
T
mit xα2 + y
α2 + z
α2 = 1 wird durch
 | (I.6) |
beschrieben[WR14]. Die Drehung ist bei positivem α
rechtshändig bezüglich der Richtung von  α (Der Daumen
zeigt in die Richtung von
α (Der Daumen
zeigt in die Richtung von  α, die Finger geben die
Drehrichtung).
α, die Finger geben die
Drehrichtung).
 Lizenzinformationen
Lizenzinformationen