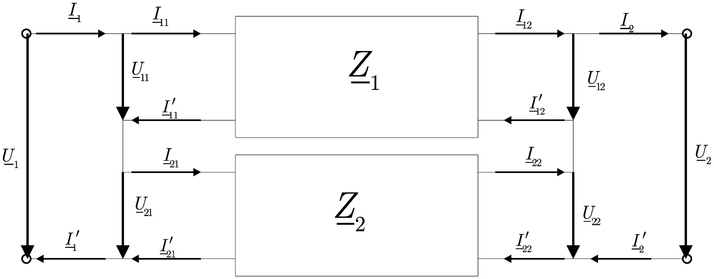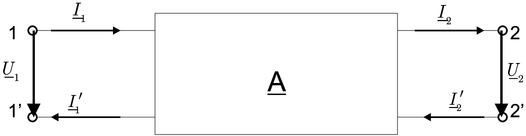
| Abbildung 2.35.: | Anschlüsse, Ströme und Spannungen bei einem Vierpol |

Ein Vierpol ist ein elektrisches Schaltteil (einfach oder zusammengesetzt), das von aussen mit vier Klemmen angesteuert wird[Ros83]. Zwei der Klemmen dienen als Eingang, zwei als Ausgang. Wenn nun am Eingang eine Spannung angelegt wird, so fliest ein Strom, der aber auch von der Belastung am Ausgang abhängt. Genauso kann der Ausgang auf den Eingang rückwirken. Ebenso gibt es Kopplungen vom Eingang auf den Ausgang.
Die Vierpoltheorie beschreibt in einer linearen Näherung um den Arbeitspunkt die Wirkung einer Schaltung. Im Gegensatz zu der Anwendung von Blockschaltbildern wird hier die gegenseitige Beeinflussung von Schaltungen berücksichtigt.
Die Ströme an den Klemmen 1 und 1’ sowie 2 und 2’ sind jeweils gleich. Für lineare, zeitinvariante passive Vierpole gibt es sechs Möglichkeiten, die gegenseitigen Beeinflussungen in einem Gleichungssystem zu beschreiben. So könnte man zum Beispiel schreiben:

Die zij sind komplexwertige Koeffizienten, die wie folgt definiert sind:
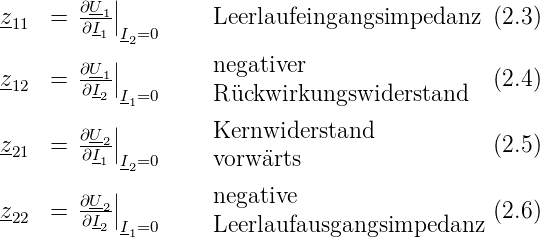
Die obigen Gleichungen geben auch die Messvorschrift für diese Impedanzen wieder. Um z11 zu bestimmen, speist man bei offenem Ausgang den Strom I1 ein und misst die resultierende Spannung U1. Die Gleichungen können kompakt als Matrix geschrieben werden, eine Tatsache die die Rechenarbeit sehr erleichtert.
 | (2.7) |
Die Matrix Z heisst die Widerstandsmatrix. Durch Permutation können die anderen möglichen Darstellungen erhalten werden. Üblich sind:
 | (2.8) |
 | (2.9) |
 | (2.10) |
 | (2.11) |
Die Matrix H ist besonders beliebt zur Angabe der Vierpolparameter von Transistoren. Bei Transistoren, inherent nichtlinearen Bauteilen, werden die Vierpolparameter am Arbeitspunkt angegeben, es sind also differentielle Parameter. Auch gebräuchlich für Transistoren ist die Y-Matrix. Die Vierpolparameter können wie in Tabelle 2.13 angegeben ineinander umgerechnet werden.
| A | Z | Y | H | |||||||||||||||||||
| A |
|
|
|
|
||||||||||||||||||
| Z |
|
|
|
|
||||||||||||||||||
| Y |
|
|
|
|
||||||||||||||||||
| H |
|
|
|
|
||||||||||||||||||
| Δa | a11a22 −a12a21 | − | − |  |
||||||||||||||||||
| Δz | − | z11z22 −z12z21 |  | − |
||||||||||||||||||
| Δy | − |  | y11y22 −y12y21 |  |
||||||||||||||||||
| Δh | − |  |  | h11h22 −h12h21 | ||||||||||||||||||
| Tabelle 2.13.: | Umrechnung der Vierpolparameter |
Die Vierpoltheorie erlaubt, das Zusammenschalten einzelner Bauelemente unter Berücksichtigung von Eingangs- und Ausgangswiderständen einfach zu berechnen. Kabel und Leitungen können mit Ketten von Vierpolen modelliert werden.
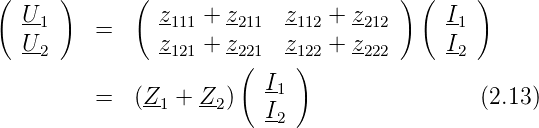
Die Serienschaltung in Abbildung 2.36 kann mit folgenden Bedingungsgleichungen berechnet werden:
Aus Gleichungen (2.8) und (2.12) kann die Matrix-Form der Serieschaltung berechnet werden:
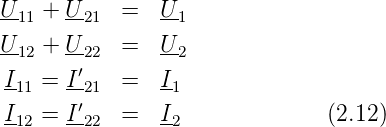
Bei der Parallelschaltung findet man analog:
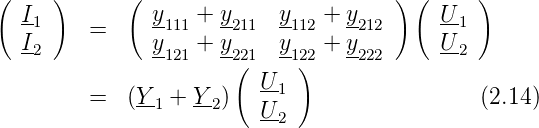
Man kann sich die Regeln für die Parallelschaltung von Vierpolen einfach merken: Wie bei Widerständen addieren sich bei einer Parallelschaltung die Leitwerte.
Bei der Kettenschaltung gilt:
Unter Verwendung der Gleichungen (2.10)für die Kettenform erhält man

Wie bei jeder Matrixmultiplikation ist die Kettenschaltung von der Reihenfolge abhängig. Physikalisch kann man sich das wie folgt klar machen: Der Eingang des zweiten Vierpols belastet den Ausgang des ersten, während sein Ausgang unbelastet ist. Ebenso wir der Eingang des ersten von einer idealen Quelle angesteuert. Wechselt man nun die Reihenfolge, so sind die jeweiligen Ein- und Ausgänge nicht mehr gleich belastet. Entsprechend muss aus physikalischer Sicht das Resultat von der Reihenfolge der Vierpole abhängen.
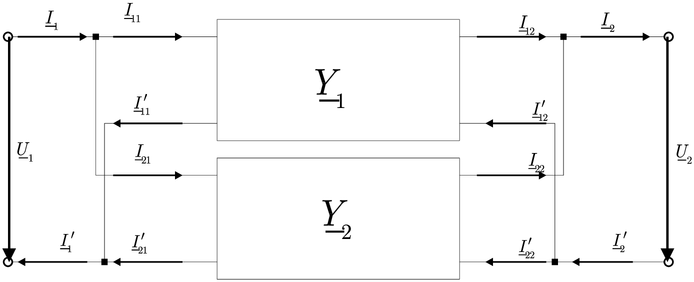
Vielfach möchte man die Spannungs- oder Stromverstärkung eines mit der Lastimpedanz ZL belasteten Vierpols wissen (Abbildung 2.39 . Die Lastimpedanz kann komplex sein, wir behandeln so auch die Frage nach kapazitiv belasteten Ausgängen.
Ausgangsstrom I2 und Ausgangsspannung U2 hängen dann wie folgt zusammen:
 | (2.17) |
Mit der Kettengleichung (2.10)wird
Damit ergibt sich für die Übertragungsfunktion der Spannung
 | (2.19) |
und des Stromes
 | (2.20) |
Der Leistungsübertragungsfaktor ist
 | (2.21) |
Die Eingangsimpedanz ist
 | (2.22) |
Weiter sind die Übertragungsimpedanz
 | (2.23) |
und die Übertragungsadmittanz
 | (2.24) |
Die Eingangsimpedanz ZI hängt nach Gleichung (2.22) von der Ausgangsimpedanz ZL ab. Sie kann Werte zwischen

Analog erhält man für die Ausgangsimpedanz ZA abhängig von der Quellimpedanz ZQ

Der Wellenwiderstand des Eingangs Z01 oder Ausgangs Z02 ist das geometrische Mittel aus den entsprechenden Kurzschluss- und Leerlaufimpedanzen.

Der Wellenwiderstand ist gerade der Abschlusswiderstand, für den der Vierpol angepasst ist. Ein mit Z02 am Ausgang abgeschlossener Vierpol hat gerade die Eingangsimpedanz Z01. Im Anpassungsfall, d.h. wenn die Impedanz der Quelle ZQ = Z01 ist und wenn der Lastwiderstand ZL = Z02 ist, hat man Leistungsanpassung
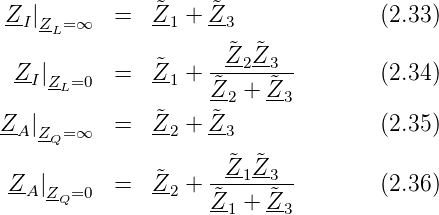
Die Wellenwiderstände lassen sich durch die Messung von Kurzschluss- und Leerlaufimpedanzen bestimmen. Diese Eigenschaft wird verwendet, um mit Netzwerkanalysatoren komplexe Hochfrequenzleiter oder Bauelemente auszumessen.
Besonders einfach ist die Bestimmung der Wellenwiderstände bei symmetrischen Vierpolen mit a11 = a22. Dann ist
 | (2.31) |
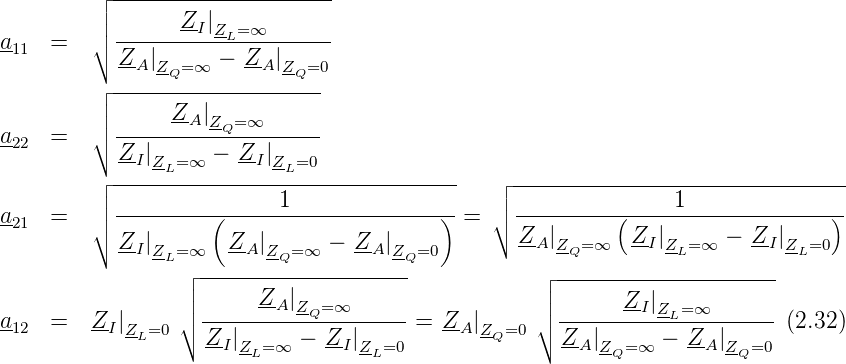
Für passive Vierpole (δa = a11a22 −a12a21 = 1) können die Kettenparameter aij durch die Ein- und Ausgangsimpedanzen bestimmt werden (Messrezept).
Das Übertragungsverhalten eines Vierpols lässt sich nun mit Ersatzschaltungen modellieren.
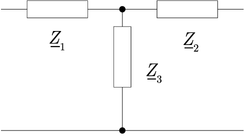
Man erhält zum Beispiel für die Sternschaltung in Abbildung 2.40 folgende Beziehungen
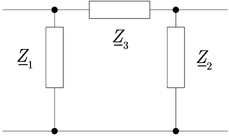
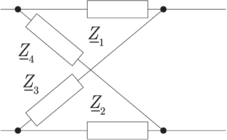
Weitere mögliche Ersatzschaltbilder sind in den Abbildungen 2.41 und 2.42 dargestellt.
 Lizenzinformationen
Lizenzinformationen